
For this project, we have decided to build a Rubik cube solver. This Rubik cube solver was not easy to build, we came over lots of obstacle in the way, such as motor jammed, sensor too weak to detect cube and some building mistakes. It was hard work over coming it but when everything is fixed, the result is very satisfying. For this time, we did not make our own program because its too complicated. We are currently trying hard to make our own program…. but…
Credits to David Gilday for coming up with this amazing masterpiece. I think its really amazing of how he can manage to make such a complicated robot and developed the software.
If you are looking for build instructions, then please visit this website→http://mindcuber.com/mindcub3r/mindcub3r.html

Features of the Mindcub3r
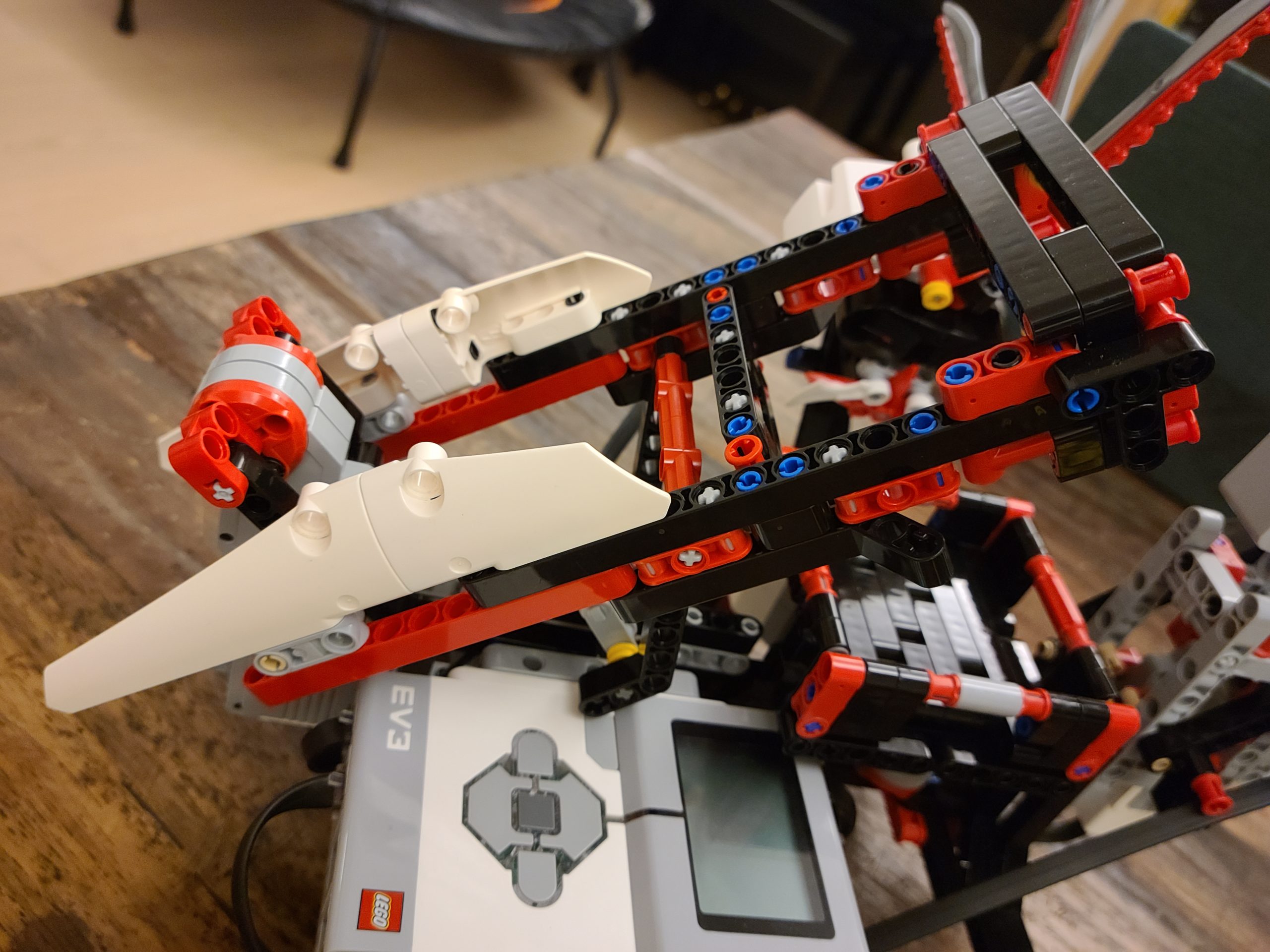
Rotation Tray
The rotation tray is used for putting a cube in the place. It is also capable of rotating the cube, so that the colour sensor can scan every tiles of the cube. When cube flipper hold the cube, the rotation tray can rotate the bottom layer of the cube.
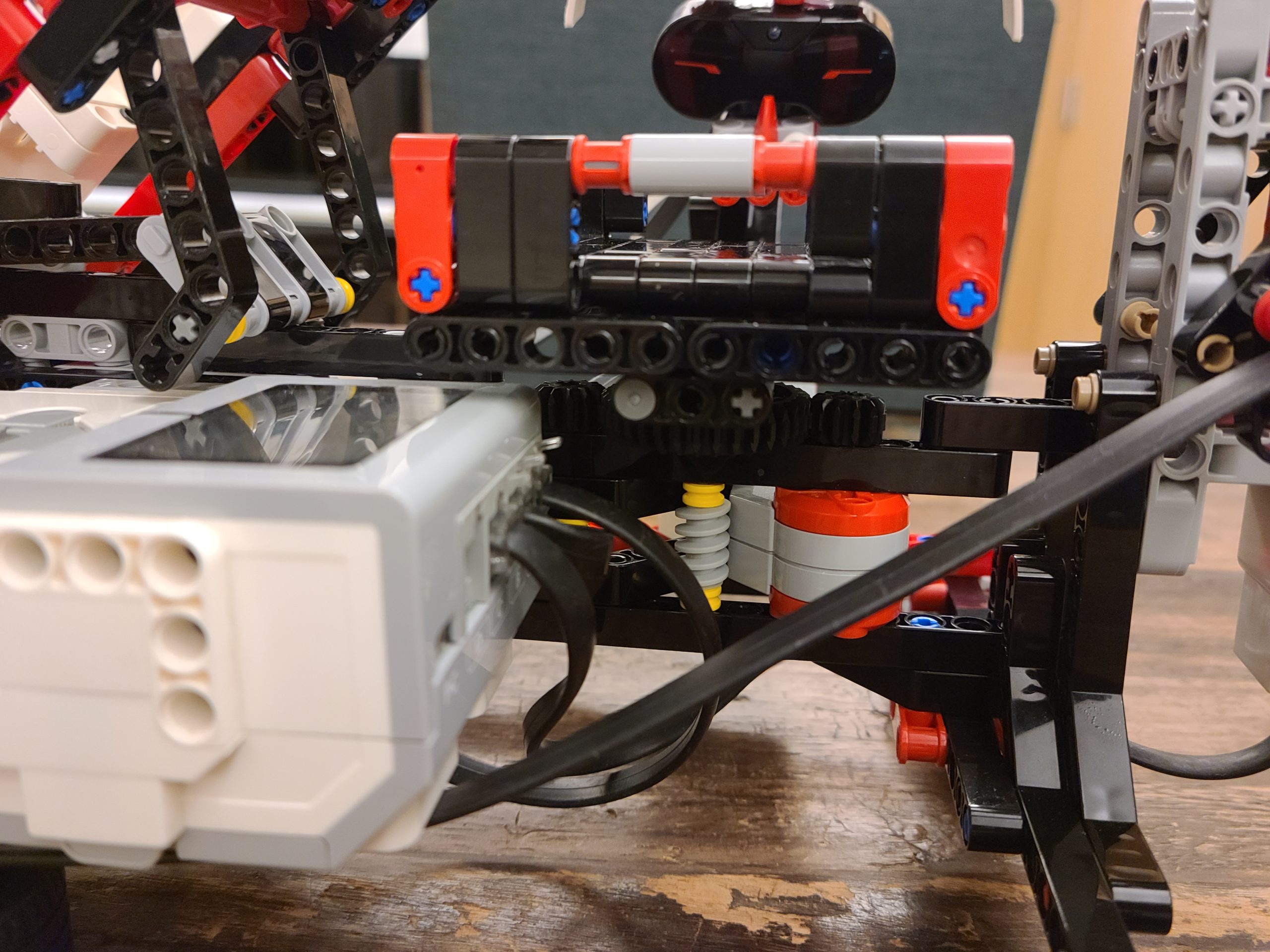
Colour Sensor
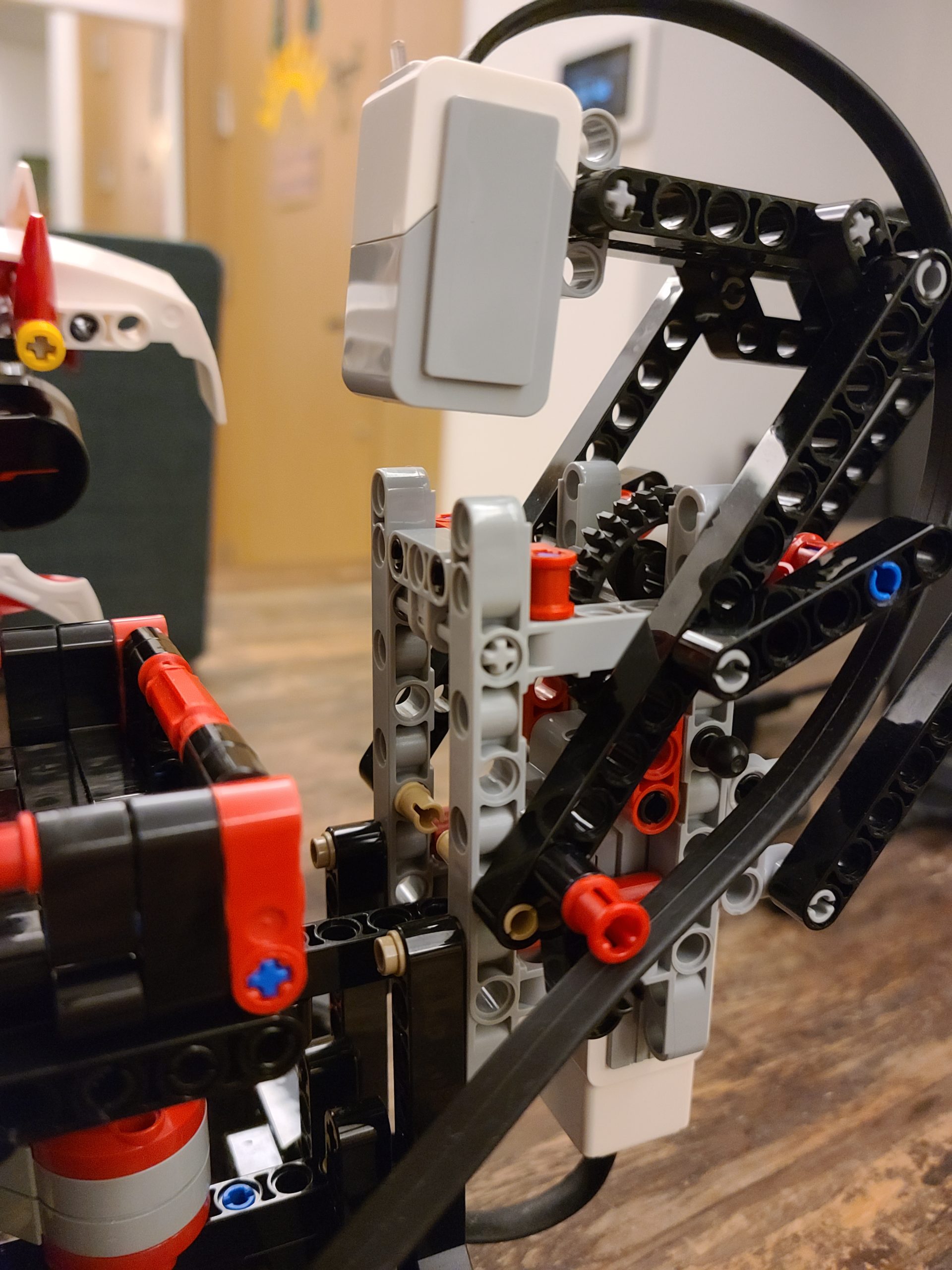
The colour sensor is used to detect colour the tiles. When the program start, the robot will be using the rotation tray, cube flipper and color sensor to scan all tiles on all six face.
Based on the information it scanned, the robot will calculate the steps to solve the cube. Most of the time, it will take ~24 steps.
Cube Flipper
The cube flipper is used to flip the cube backward to make the bottom side face to right, i.e. close to color sensor. The cube flipper can also hold the cube so the rotation tray can move the bottom layer of the cube.
Cube Detection

The cube detection is much straight forward. Judging by it’s name, its obvious that the program will start once the cube is detected.
Note: I have tilted the cube a bit forward because the sensor is too weak to detect the cube. If you ever have the same problem, just tilt the cube detection’s support a bit forward.
Attention!
Cube Surface and color reflection

Different colour surface can make a difference. If the cube is quite dull, then colour sensor signal will be weaker because there is not much reflections. At the end, some colours will be misplaced while the robot misjudge some colors. So keep in mind that only cubes with shinier tiles works.
Special Pattern
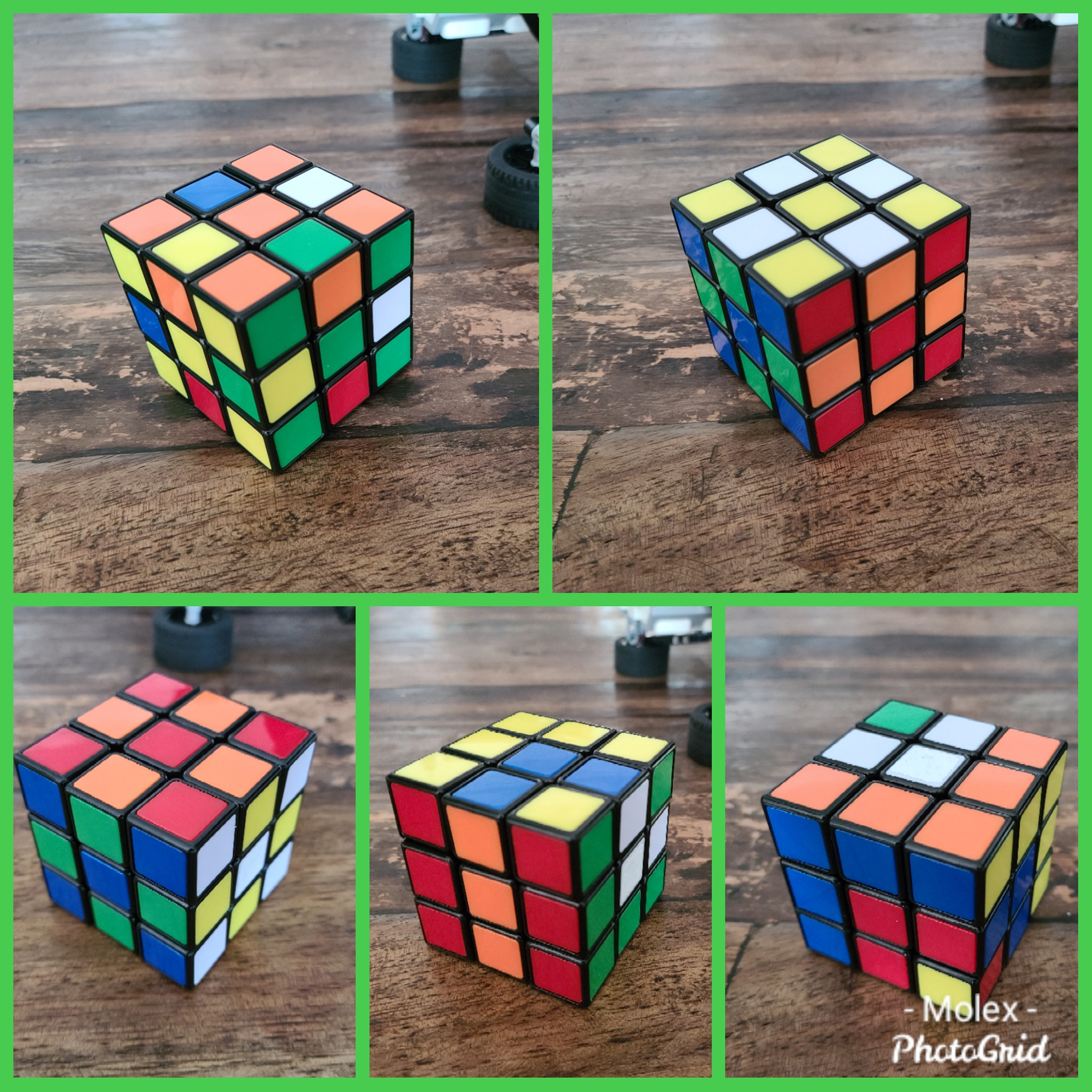
Other than fixing and mixing the cube, the robot is also capable of making different unique patterns.
There are a total of 5 patterns:
- Checkerboard
- Cube-in-cube
- Six-spot
- Snake
- Superflip