
This project is so funny and cool, we are controlling a robot which contain the cart and the lifting arm, so that it can climb stairs. Looks like a Mars rover!!
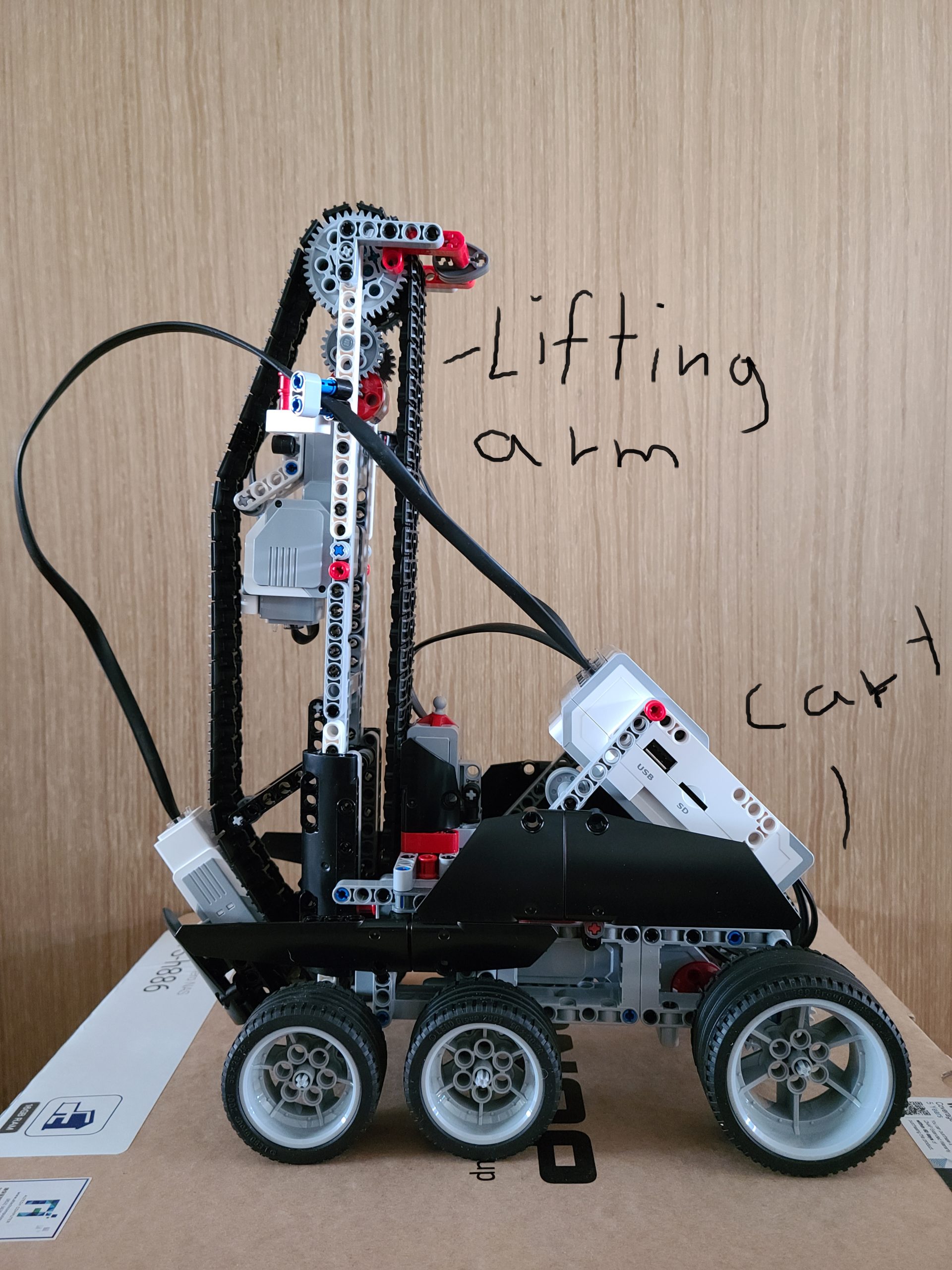
Features of the robot

Gyro Sensor – It is used to detect or reference the degrees that the project is tilting towards. If the object is tilting forward, then the numbers will be positive, it will be negative if it is tilting backwards. How do we use this gyro sensor in our robot? It can be used to set a limit on how much you should tilt. For example, you want your cart to tilt to -15 then stop and reset degrees counter, then the gyro sensor will come in handy because it detects how much the robot tilts.
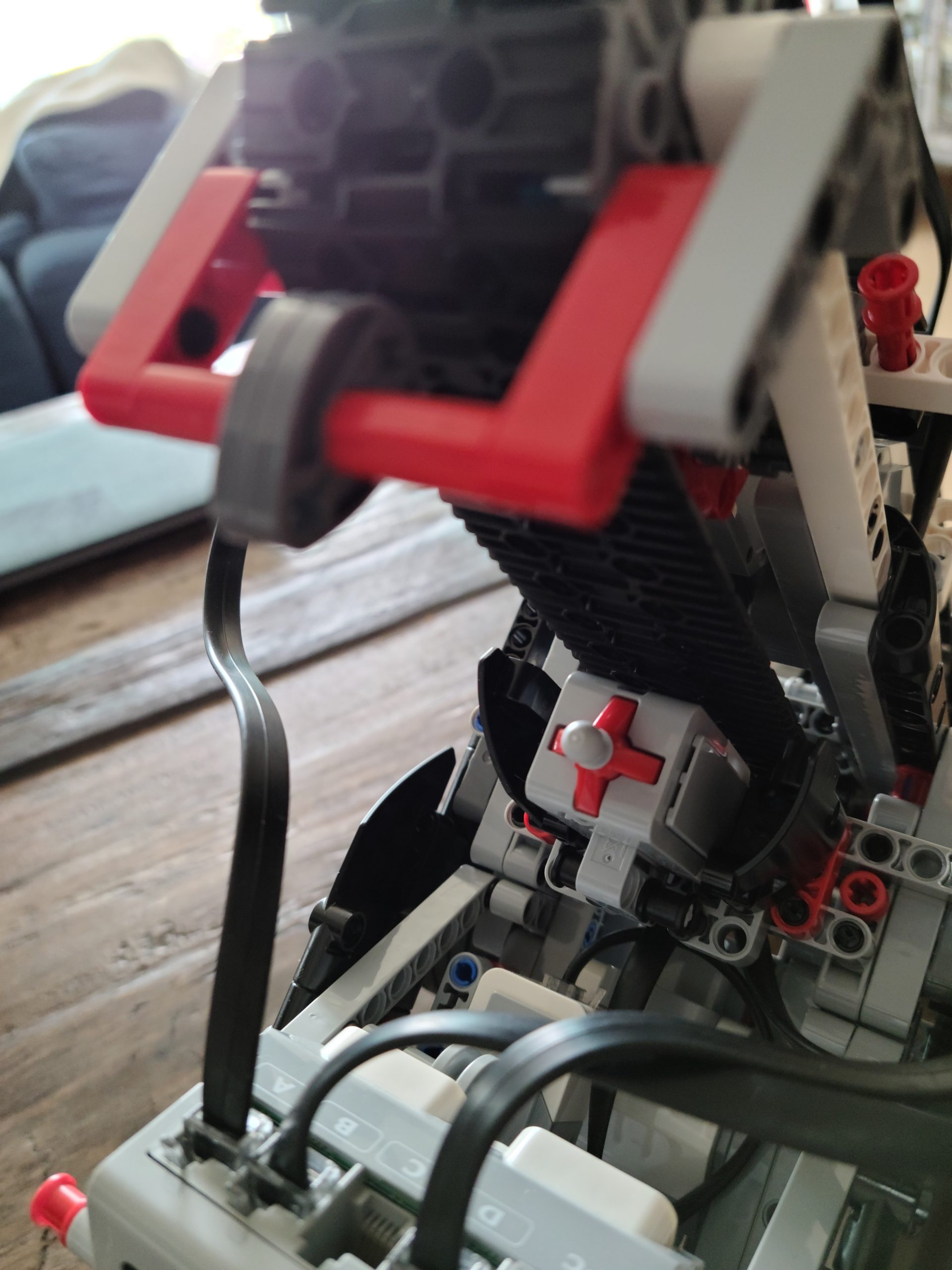
Touch sensor – It is used to send signals when something goes in contact with it. In this stair climbing project, the touch sensor is used as a calibration. When the top part come in contact with the touch sensor, then it will reset the degrees counter and it will return to the straight form. Why is the calibration important? The calibration is used to limit how much the belt should go. If the belt goes over the limit, then the motor will malfunction or in worst scenario, even break the motor.
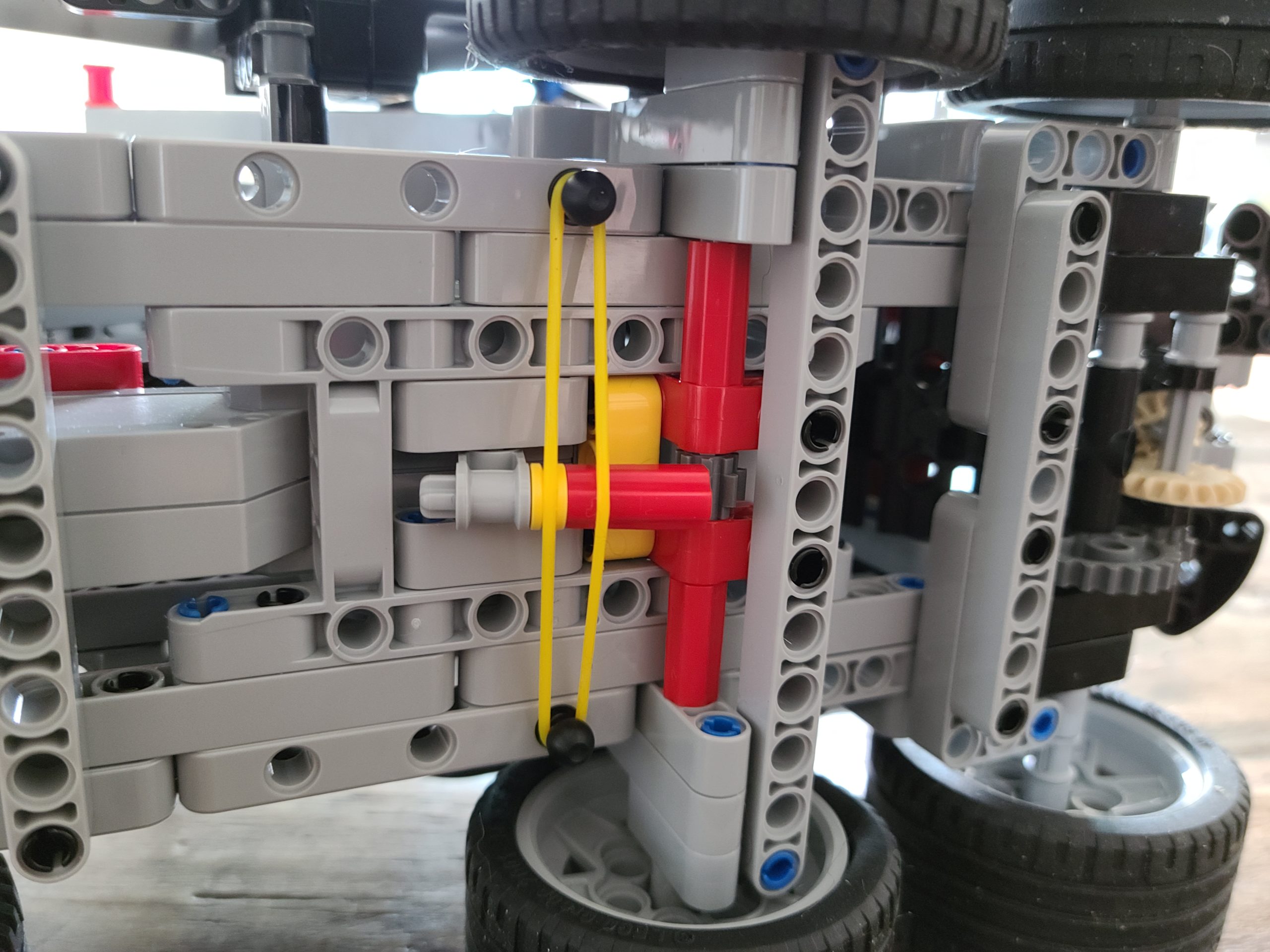
‘Little Fella’ – This little guy’s function is kind of confusing, I thought it was just a noise maker at first. This little guy’s function was unknown until we tested the project. When we tried our first run, we realize that the little guy has the function to stop the middle wheel from moving backwards. What a powerful little fella…
Calibration
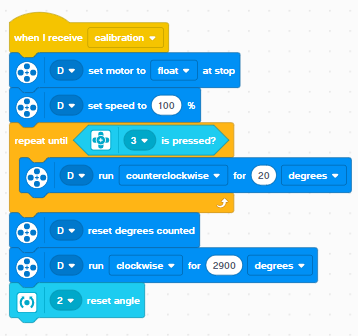
This program is the calibration part. It is the most important part of the whole program, because we always need to check the limit and identify the zero point, so that it will not mess up the motor movement because of wrong degree number.
Moreover, we also identify the gyro sensor horizontal level and rest to zero when it sitting on the floor.
So what I did in this program is that I made the lifting arm go up until it presses the button, when it presses the button it will reset the degrees counted so that the top will be the zero point, then the lifting arm goes down by moving the motor clockwise by 2900 degrees. (we got it manually) then we reset the Gyro sensor since it is horizontal to the floor.
Stair Climber Movement concept
When the stair climber moves forward and hit the wall, the front wheel will make the cart going upward and result as tiling up. Once we detect tiling for a certain degree, we will activate the lifting arm to push the cart upwards until it reach the top of stair, we call this landing. Once the cart landed, it will be no longer tilting upward, i.e. no tilting or very small tilting. Then, we will collect the lifting arm to the top of stair and moving forward for the next climbing.
IMPORTANT! When we doing above action, we need to control the back wheel action carefully. If back wheel pushing too much, the cart will flip over because of the center of gravity changed.
How’s the program working?
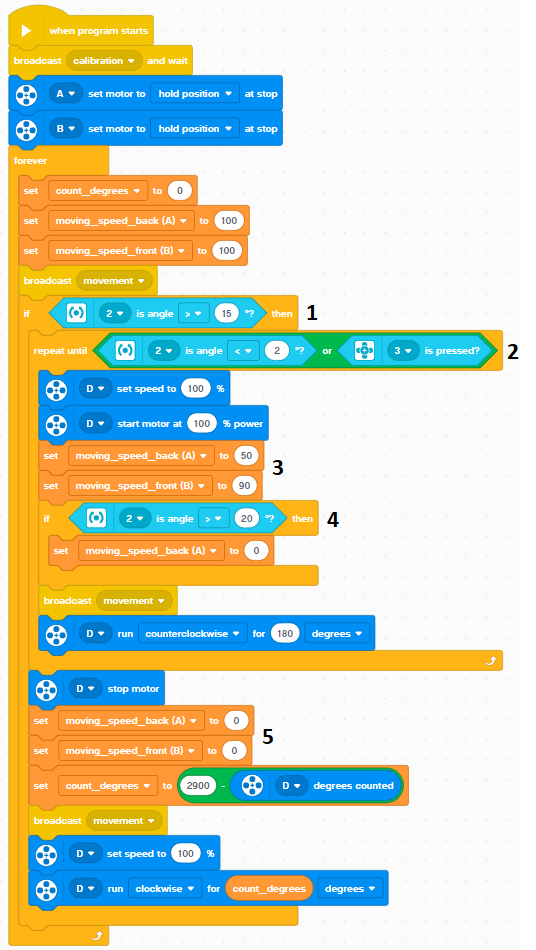
- Check whether the gyro sensor detects tiling and if it is more than 15 degree, i.e. the forward wheel rotate against the wall and the head tilt up. If yes, it will start the lifting action 2.
- Determine if the cart landed or the lifting arm reach the max. Otherwise, keep the arm lifting action.
- We need to balance the speed of the wheels. If we make the back wheel too fast, the cart will flip over while going up the stairs. If the back wheel goes too slow, the cart will be too slow for the landing and it will be stuck at the edge of the stairs. We also need to make the front wheel rotating speed synchronized to the lifting arm speed.
- We have to balance the cart if it is tilting so much like it is going to fall. We have to stop the back wheel so that the cart will not keep moving forward, i.e. change the center of gravity. So, we stop the back wheel for a certain tilting angle that the cart may flip over.
- We need to stop the wheels before the lifting arm move up or else the lifting arm is going to snap. After stopping the wheels, we pull the lifting arm back up to the original place. Then, the stair climber keep going for next stair.
Build instruction and the program
We created the program from scratch without referring any example, you can download from below.
LEGO Offical build instruction
I also attached the link for LEGO EV3 Classroom for your quick reference, click here.